I. Descripción general del sistema
1. Antecedentes del proyecto
En los últimos años, el transporte ilegal de mercancías por carretera se ha convertido en un grave problema que pone en peligro la seguridad vial nacional. Provoca la sobrecarga de autopistas y puentes, reduciendo considerablemente su vida útil; al mismo tiempo, disminuye drásticamente la seguridad de los vehículos, lo que ocasiona accidentes de tráfico constantes; además, contribuye a la congestión del tráfico y a la contaminación ambiental.
Los gobiernos de todos los niveles en todo el país han intensificado continuamente sus esfuerzos para controlar el transporte con sobrecarga en las carreteras y han logrado avances significativos. Sin embargo, debido a complejos factores socioeconómicos, la situación nacional en materia de detección de sobrecarga sigue siendo muy grave y persisten los riesgos de un rebrote. Consolidar los resultados de la gestión y promover continuamente la detección de sobrecarga aún se encuentra bajo una gran presión. Por lo tanto, la gestión del transporte con sobrecarga es una labor constante y a largo plazo que requiere perseverancia. Es fundamental integrar la gestión de la sobrecarga en un mecanismo a largo plazo. Este mecanismo también desempeña un papel disuasorio legal sobre los vehículos con sobrecarga y puede ampliarse para incluir la inspección vial, combatir la mentalidad de riesgo que impulsa las operaciones de transporte ilegal y controlar y eliminar oportunamente diversas actividades de transporte ilegal, incluido el transporte con sobrecarga.
2. Introducción al sistema de pesaje
El principio de funcionamiento de las básculas estáticas para camiones consiste en estacionar todos los vehículos en la plataforma para pesarlos en su totalidad. Ofrecen alta precisión y cumplen con las normas nacionales establecidas. Sin embargo, las básculas convencionales solo registran el peso total del vehículo, no el peso por eje. Pueden determinar si el vehículo completo está sobrecargado, pero no si lo está el peso por eje. Por lo tanto, no satisfacen los requisitos de las autoridades viales para la gestión del transporte con sobrecarga.
Este plan combina la amplia experiencia de nuestra empresa en el diseño y la fabricación de equipos de detección de sobrecarga y su aplicación práctica en diversas regiones del país. Analiza minuciosamente el uso de los distintos equipos de detección de sobrecarga disponibles en el mercado y considera integralmente las necesidades específicas de los departamentos de gestión de carreteras en materia de gestión del transporte con sobrecarga. Adopta tecnología avanzada e ideas de diseño innovadoras para desarrollar un sistema dinámico de detección de peso vehicular y tipo de eje de alta precisión. Permite pesar tanto el peso por eje como el peso total, y distinguir el tipo de eje. Además, mejora significativamente la precisión del peso por eje.
2. Composición del sistema de sobrecarga y sobrelímite
1. Características del sistema
Puede pesar los vehículos que pasan a baja velocidad y determinar automáticamente si el peso del vehículo o el peso por eje es excesivo;
Puede detectar el número de ejes, el grupo de ejes, el peso por eje y el peso del vehículo;
Puede generar información completa sobre el pesaje del vehículo, incluyendo tipo de eje, peso por eje, grupo de ejes y peso total;
Puede transmitir información de pesaje al ordenador a través de la interfaz de datos;
La parte central del sistema emplea equipos maduros y fiables, todos ellos con un diseño modular que facilita su mantenimiento y ampliación, garantizando así la alta fiabilidad del sistema.
El software del sistema es maduro, altamente fiable, los datos son completos y eficaces, y pueden compartirse plenamente, mejorando eficazmente la eficiencia del trabajo y eliminando en la mayor medida posible diversas deficiencias de gestión.
2. Proceso del sistema
El camión se introduce en el carril de pesaje de la estación de sobrecarga y el sistema de reconocimiento de matrículas identifica el número de matrícula;
El identificador del neumático (eje) distingue el número de ejes, y el sistema de pesaje del vehículo comienza a pesar, determina el grupo de ejes y calcula el peso por eje.
Cuando todos los vehículos pasan por el separador de vehículos y entran en la plataforma de pesaje, y la báscula está en un estado relativamente equilibrado, se registra el peso total del vehículo y se obtiene el peso por eje.
El sistema de pesaje envía información de pesaje (número de matrícula, número de ejes, peso por eje, peso total del vehículo, etc.) al ordenador de detección. El ordenador determina si se ha excedido el límite de peso y muestra la información de detección, como el peso del vehículo, el exceso de peso y el porcentaje de exceso de peso, en la pantalla.
Una vez que el vehículo complete las operaciones pertinentes, el personal de guía del vehículo autoriza a los vehículos que no exceden el límite de velocidad a abandonar el área de detección según la información en la pantalla, guía a los vehículos que exceden el límite de velocidad a ingresar al área de la estación para su procesamiento, imprime el formulario de inspección del vehículo que excede el límite de velocidad y realiza las operaciones de cobro pertinentes;
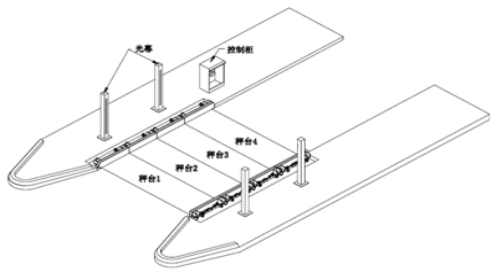
3. Composición del sistema y plano de distribución
3.1 Composición del sistema
El sistema de detección de sobrelímites y sobrecargas consta de una báscula dinámica de cuatro mesas para ejes ZDG, un instrumento de control, un separador de vehículos infrarrojo, un identificador de ejes de ruedas para la plataforma de pesaje, un armario de control, (equipo opcional: sistema de reconocimiento de matrículas, sistema de visualización LED de gran tamaño, sistema de avisos por voz, sistema de guiado de vehículos, ordenador industrial, impresora de tickets, sistema de alimentación ininterrumpida UPS, software del sistema de detección de sobrelímites y sobrecargas, sistema de monitorización) y otros accesorios y cables.
3.2 Diagrama de distribución del sistema como se muestra:
Flujo de trabajo:
1) Los vehículos entran al carril en secuencia manteniendo una distancia segura, activando el separador de vehículos infrarrojo;
2) Cada eje del vehículo pasa por la plataforma de pesaje multisuperficie;
3) El controlador de visualización procesa la señal de pesaje obtenida del sensor de la plataforma de pesaje y la señal del sensor de la rueda, separa el eje de acuerdo con las condiciones lógicas y maneja eficazmente situaciones especiales;
4) La parte trasera del vehículo abandona la plataforma de pesaje multisuperficie y el separador de vehículos infrarrojo;
5) El controlador de visualización evalúa de forma integral la señal de fin de vehículo basándose en la señal de oclusión detectada por el separador de vehículos infrarrojo y la señal de pesaje obtenida por el sensor de pesaje;
6) El controlador de visualización procesa la señal de pesaje obtenida cuando el vehículo mencionado anteriormente pasa por la plataforma de pesaje;
7) El controlador de visualización genera una información de pesaje completa de todo el vehículo, y esta información incluye la velocidad del vehículo, el tipo de eje, el peso del eje, el peso del grupo de ejes, el peso total, etc.;
8) Complete el proceso de pesaje de un vehículo y espere a que se pese el siguiente.
9) Durante todo el proceso de trabajo, el sistema maneja automáticamente diversas situaciones especiales, como entrada y salida completas, entrada y salida repetidas y permanencia prolongada en la plataforma de pesaje;
El sistema puede gestionar de forma automática y eficaz la situación del vehículo que le sigue, y el pesaje de dicho vehículo no afecta a la precisión de los datos.

Fecha de publicación: 20 de febrero de 2025